Safe food| Food for Thought
Team Updates


Home Web Page by Safe Food
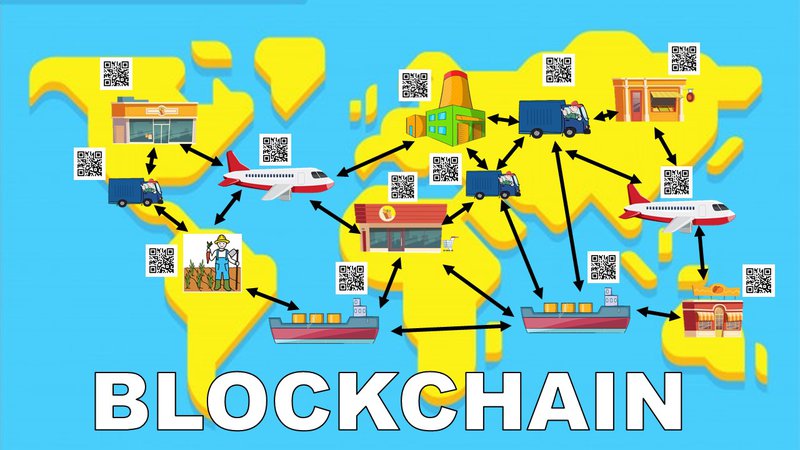
What is blockchain
Our social networks
Facebook: https://www.facebook.com/Safe-food-100587511688183
Twitter: https://twitter.com/safefood9?s=09
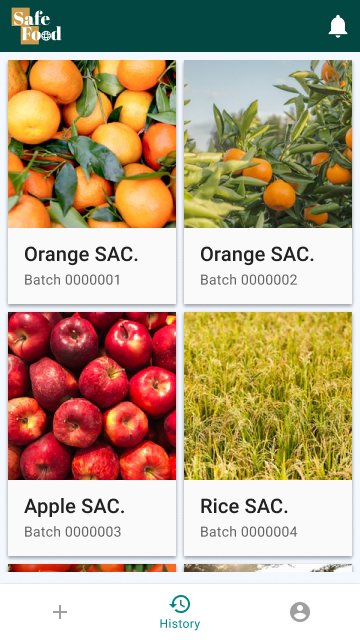
Our app
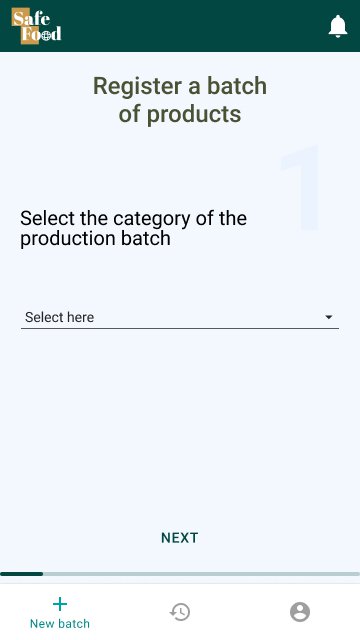
Our app

Our app
This file contains hidden or bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters. Learn more about bidirectional Unicode characters
| importrandom | |
| fromMapCreator.MapFuncsimportgenerate_map | |
| #Random' coordinates near the central point. | |
| defrandom_acot_point(point, n): | |
| points= [(point[0]+random.randrange(1, 2*n)/10, point[1]+random.randrange(1, 2*n)/10) for_inrange(n)] | |
| points=tuple(set(points)) | |
| returnpoints | |
| #Sequential and random node connection. | |
| defaleatore_nodes(points, n): | |
| nodes= [*zip(points, (points[-1],)+points[:-1])] | |
| for_inrange(n): | |
| nodes.append((*random.choices(points), *random.choices(points))) | |
| returntuple(nodes) | |
| if__name__=='__main__': | |
| #Central test point. | |
| punto= (41.257160, -95.995102) | |
| points=random_acot_point(punto, 15) | |
| nodes=aleatore_nodes(points, 1) | |
| #test | |
| generate_map(punto, points, nodes, 'Test') |
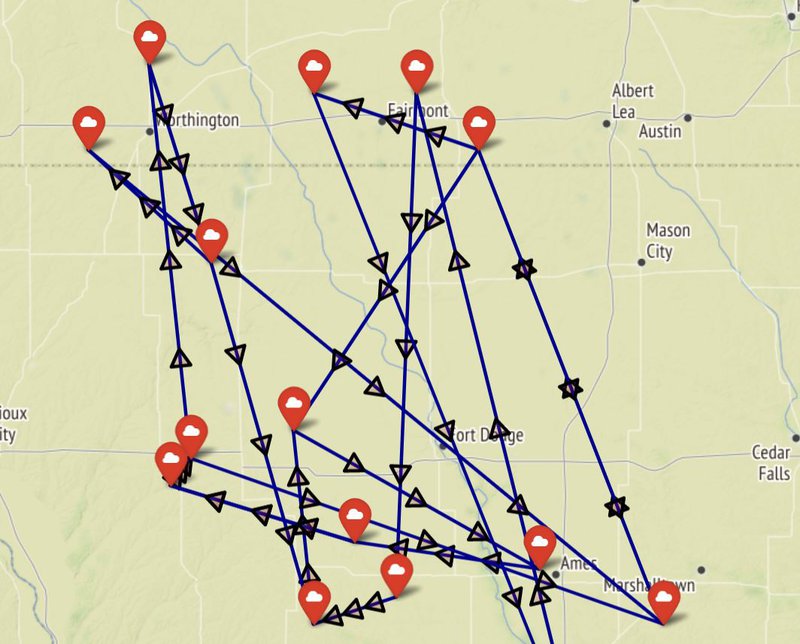
Pseudo-random simulation of nodes, to test the application, in a limited region.
This file contains hidden or bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters. Learn more about bidirectional Unicode characters
| classMapSafeFood: | |
| MAP_TYPE=folium.Map | |
| ZOOM=10 | |
| TILES='Stamen Terrain' | |
| POINT_ICON='cloud' | |
| POINT_COLOR='red' | |
| ICON_CONFIG= {'icon': POINT_ICON, | |
| 'color': POINT_COLOR} | |
| POPUP_TEXT='Non Data' | |
| TOOLTIP_TEXT='Information' | |
| LINES_COLOR='darkblue' | |
| N_ARROWS=3 | |
| ARROWS_COLOR='black' | |
| ARROWS_FILL_COLOR='darkred' | |
| ARROWS_SIDES=3 | |
| ARROWS_SIZE=10 | |
| def__init__(self, location:tuple, zoom_start:int=ZOOM, tiles:str=TILES, **options) ->None: | |
| #We locate the map, and give them an initial design and zoom. | |
| self.__mapp=folium.Map(location=location, zoom_start=zoom_start, tiles=tiles, **options) | |
| defadd_points(self, points:list , popup:str=POPUP_TEXT, tooltip:str=TOOLTIP_TEXT, | |
| icon_config:dict=ICON_CONFIG, **options) ->None: | |
| #Points, icon, message on mouse over, and click. | |
| forpointinpoints: | |
| folium.Marker(point, | |
| popup=popup, | |
| tooltip=tooltip, | |
| icon=folium.Icon(**icon_config), | |
| **options).add_to(self.__mapp) | |
| defadd_lines(self, line:tuple, color:str=LINES_COLOR, **options) ->None: | |
| folium.PolyLine(line, color=color, **options).add_to(self.__mapp) | |
| #Ajustar la rotación. | |
| defadd_arrows(self, line:tuple, n_arrows:int=N_ARROWS, color:str=ARROWS_COLOR, | |
| fill_color:str=ARROWS_FILL_COLOR, number_of_sides:int=ARROWS_SIDES, | |
| radius:int=ARROWS_SIZE, **options) ->None: | |
| #n number of halfway arrows, (x, y) | |
| loc_arrows=zip(np.linspace(line[0][0], line[1][0], n_arrows+2)[1:n_arrows+1], | |
| np.linspace(line[0][1], line[1][1], n_arrows+2)[1:n_arrows+1]) | |
| #The rotated arrow following the direction of the origin line. | |
| rotation=self.concordant_rotation(line[0], line[1]) -90 | |
| #We plot the triangles/arrows | |
| forloc_arrowinloc_arrows: | |
| folium.RegularPolygonMarker(location=loc_arrow, color=color, fill_color=fill_color, | |
| number_of_sides=number_of_sides, radius=radius, rotation=rotation, **options | |
| ).add_to(self.__mapp) | |
| #The options in this case is a dictionary with the options of lines and arrows | |
| defadd_arrows_lines(self, lines:tuple, **options) ->None: | |
| forlineinlines: | |
| self.add_lines(line, **options.get('line', {})) | |
| self.add_arrows(line, **options.get('arrow', {})) | |
| #We saved the map in HTML format | |
| defsave(self, name:str) ->None: | |
| self.__mapp.save(f'{name}.html') | |
| #Getter of the map. | |
| @property | |
| defget_map(self) ->folium.Map: | |
| returnself.__mapp | |
| @staticmethod | |
| defconcordant_rotation(p1, p2): | |
| #Based on https://gist.github.com/jeromer/2005586 | |
| long_diff=np.radians(p2[1] -p1[1]) | |
| lat1=np.radians(p1[0]) | |
| lat2=np.radians(p2[0]) | |
| x=np.sin(long_diff) *np.cos(lat2) | |
| y= (np.cos(lat1) *np.sin(lat2) | |
| - (np.sin(lat1) *np.cos(lat2) | |
| *np.cos(long_diff))) | |
| bearing=np.degrees(np.arctan2(x, y)) | |
| #Adjusting for compass bearing | |
| ifbearing<0: | |
| returnbearing+360 | |
| returnbearing |
This file contains hidden or bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters. Learn more about bidirectional Unicode characters
| limits= [] | |
| manager=multiprocessing.Manager() | |
| queue=manager.Queue() | |
| thr_rows=threading.Thread(target=limit_max, args=('1000', '0')) #rows | |
| thr_column=threading.Thread(target=limit_max, args=('0', '1000')) #columns | |
| thr_rows.start() | |
| thr_column.start() | |
| matrix_base(15, 50) | |
| thr_rows.join() | |
| thr_column.join() | |
| limits.sort() | |
| pro1=multiprocessing.Process(target=download_set, args=(queue, limits) ) | |
| pro1.start() | |
| pro2=multiprocessing.Process(target=download_set, args=(queue, limits)) | |
| pro2.start() | |
| pro1.join() | |
| pro2.join() | |
| join_mosaic('Total') | |
Member

Member

Member
Member

icon

Teammates